
Labs & Facilities
Marine Hydrodynamics Laboratory

The Aaron Friedman Marine Hydrodynamics Laboratory (MHL) is a suite of laboratories and facilities that engage in classic naval architecture experiments, renewable energy, and hydrodynamics research.
Computational Autonomy & Robotics Laboratory

The Computational Autonomy and Robotics Laboratory at the University of Michigan develops novel algorithms for mobile robots concerning multimodal perception, learning, autonomous navigation, exploration, and environmental monitoring.
Marine Structures Design Laboratory
The Marine Structures Design Laboratory (MSDL) is focused on developing the next generation of structural design and analysis tools for the marine industry including; creating rapid and accurate strength methods for lightweight aluminum marine structures, building unique evolutionary optimization approaches for rapid trade-space exploration of structural designs, developing novel tools to allow in-service re-assessment of structures and updatable forecasting of lifecycle cost, reliability, and capability.
Marine Engineering
Laboratory
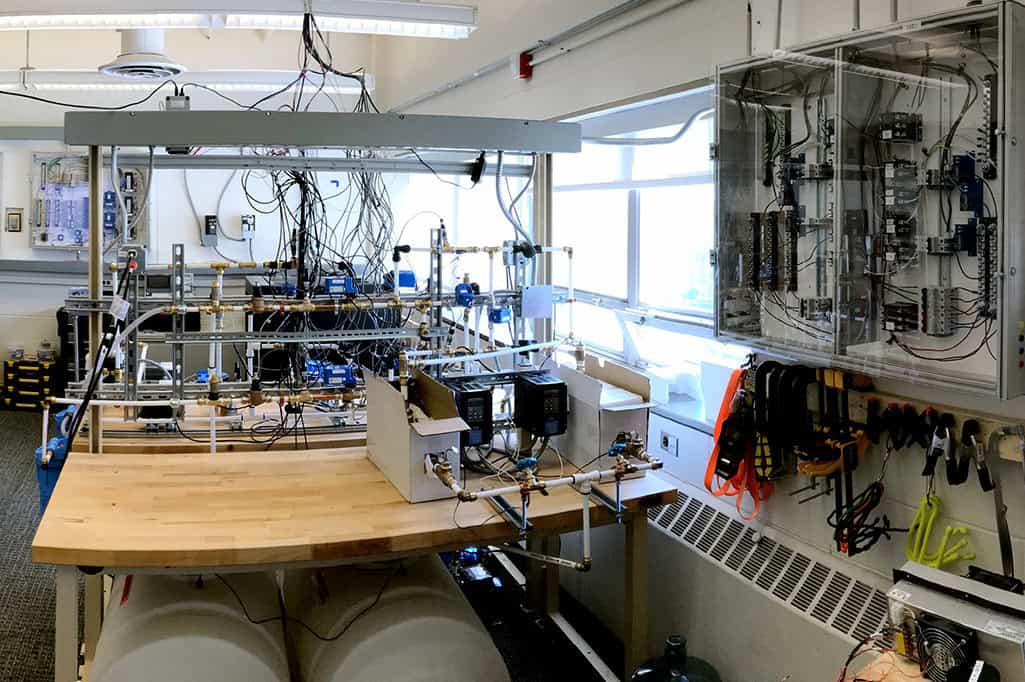
Marine Engineering Lab’s goal is a first-of-its-kind multi-physics hardware lab dedicated to marine engineering systems. The MEL features a scaled representation of a shipboard electric power and propulsion system, a seawater cooling system and a fuel system; all interconnected as they would be aboard a ship enabling the dynamics of one system to affect the others. The initial use for the lab will be to investigate equipment and system failures to improve understanding of how component reliability affects overall mission accomplishment.
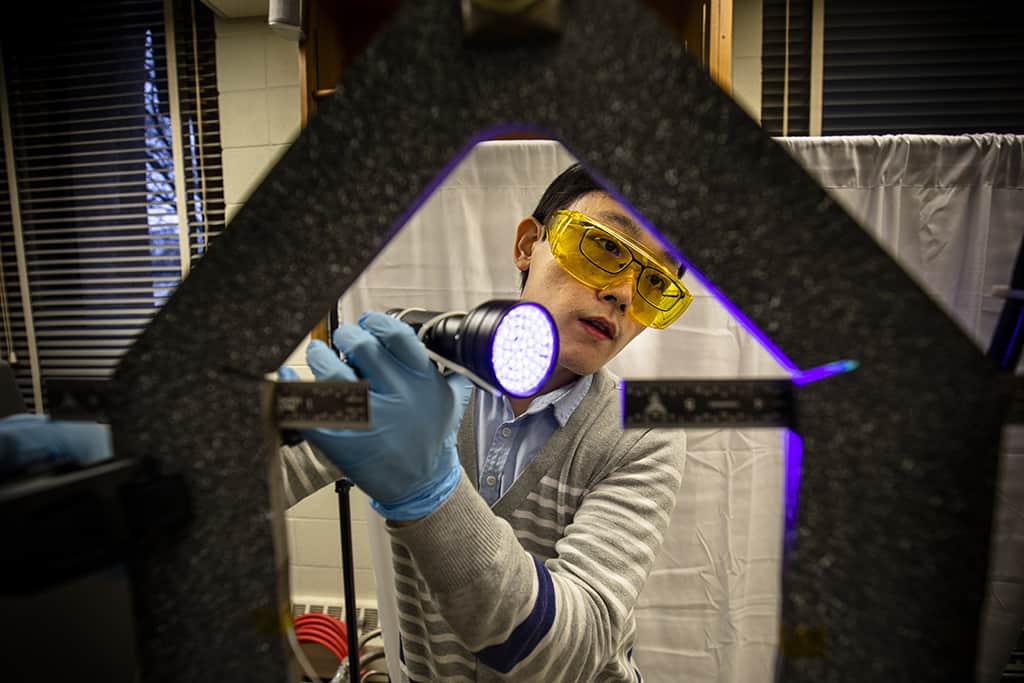
Real-time Adaptive Control Engineering
Real-time Adaptive Control Engineering Lab (RACELab) was established by Professor Jing Sun to support advanced research and graduate education for marine system control and optimization. The lab is equipped with state-of-the-art real-time simulation and control rapid prototyping technologies. An 8-node Opal-RT simulator and several programmable power supplies and loads form a reconfigurable platform for real-time simulation, control rapid prototyping and optimization algorithm validation.
Computational Ship Hydrodynamics Laboratory
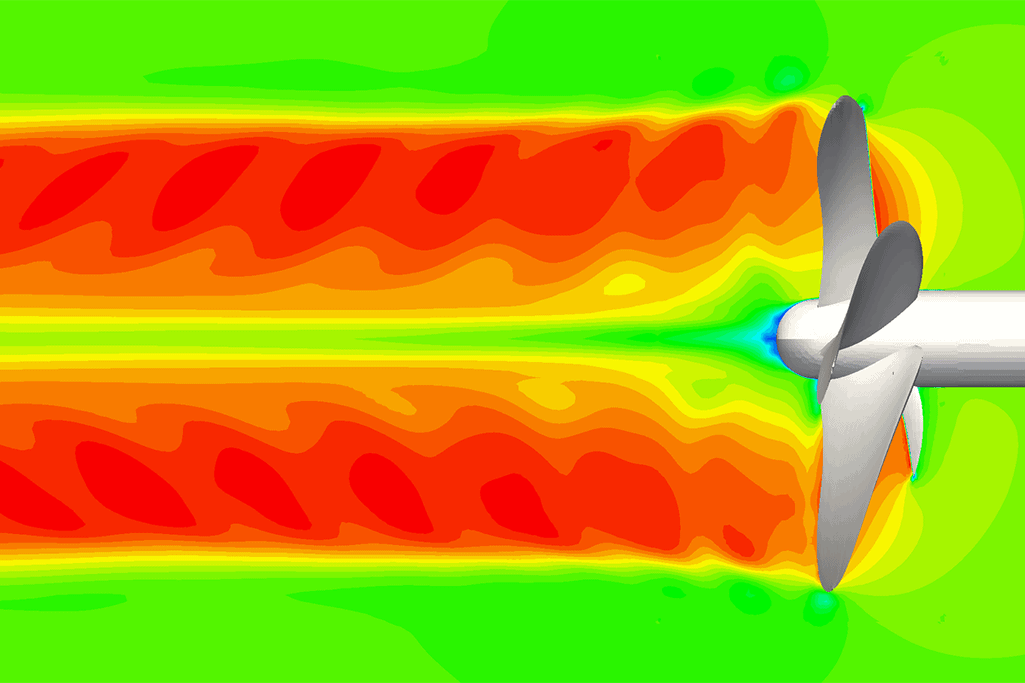
The Computational Ship Hydrodynamics Laboratory (CSHL), lead by Associate Professor Kevin Maki, pioneers the development of advanced methods and numerical algorithms for a wide range of ship flow problems including velocity decomposition, hydroelesticity and slamming, design for arctic operations, and design events in extreme seas.
Advanced Naval Concepts Research Laboratory (ANCR)

The Advanced Naval Concepts Research Laboratory (ANCR) at the University of Michigan furthers the capabilities of naval vessel designers through educations, research, and support of existing Navy programs.